






Omnid Mocobot ها به منظور همکاری و کمک به انسانها در بلند کردن و جابجایی اشیاء سنگین طراحی شده اند.
فرارو-محققان مرکز رباتیک و بیوسیستم دانشگاه نورث وسترن اخیرا رباتهای متحرک جدیدی را توسعه دادهاند که Omnid Mocobots نامیده میشوند.
به گزارش فرارو، این رباتها که در مقالهای در سایت مقالات علمی arXiv معرفی شده اند، به منظور همکاری و کمک به انسانها در بلند کردن و جابجایی اشیاء سنگین طراحی شده اند. در سالهای اخیر، بسیاری از این رباتها در محیطهای واقعی مورد آزمایش قرار گرفته و به نتایج بسیار امیدوارکنندهای نیز دست پیدا کرده اند.
«متیو الوین» یکی از محققان این مطالعه، میگوید: «مرکز رباتیک و بیوسیستم دانشگاه نورث وسترن سابقه طولانی در ساخت رباتهایی دارد که از نظر فیزیکی با انسانها همکاری میکنند. در واقع اصطلاح cobots از اینجا ابداع شده است. این واژه الهام بخش مشاغل تولیدی، انبار و ساخت و ساز است. موکوباتها با هدف کمک به انسانها در انجام وظایف سنگین طراحی شده اند.»
همکاری بین انسان و چندین موکوبات چند مزیت اصلی خواهد داشت که مهمترین آنها ادغام دقت و قدرت رباتها و سازگاری و آگاهی موقعیتی نیروهای انسانی میباشد. موکوبات Omnid، از یک پایه متحرک و یک بازوی رباتیک تشکیل شده است. این ربات دارای ویژگیهای مهمی برای تعامل با انسانها است که آن را از سایر رباتها متمایز میکند. الوین میگوید: «این بازوهای رباتیک انطباق مکانیکی داخلی بیشتری نسبت به سایر رباتها ارائه میدهند و در مقایسه با بازوهای رباتیک معمولی برای تعامل با انسان ایمنتر هستند و کمتر به اجسام آسیب میزنند.»
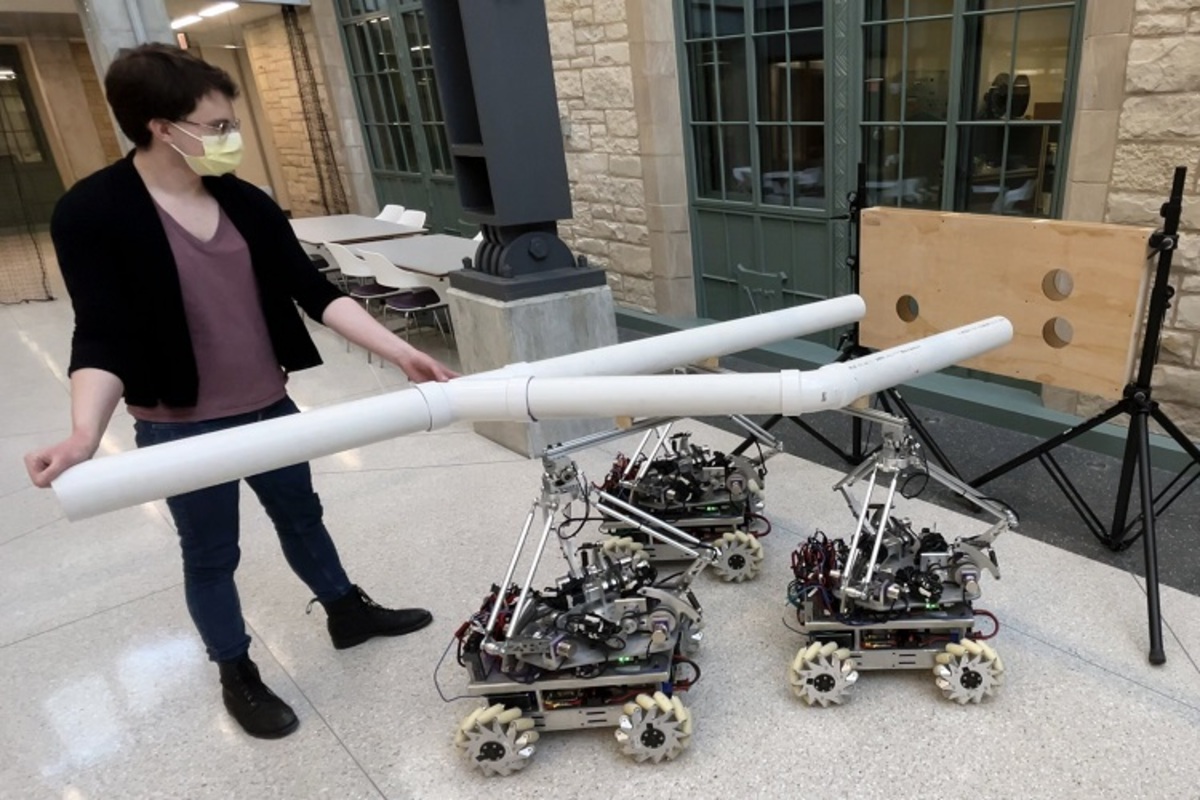
الوین و همکارانش در آزمایشهای اولیهشان، عملکرد این ربات را مورد ارزیابی قرار دادند. در این آزمایش یک کاربر انسانی هنگام همکاری با سه ربات، تنها با یک دست توانست یک لوله ۱۵ کیلوگرمی را به درستی حمل کند الوین میگوید: «در آینده تیمهای بزرگتری از موکوبوتهای قدرتمندتر خواهیم داشت که به همکاری یک یا تعداد بسیار کمی از انسانها برای حمل ساختارهای بزرگی مانند یک تیغه روی توربین بادی یا یک پنل خورشیدی در زیستگاه مریخ نیاز خواهند داشت.»
این رباتها در حال حاضر قادر به دستکاری خودکار اجسام با استفاده از کنترلکنندههای از پیش برنامهریزیشده یا استراتژیهای آموزش داده شده توسط همکاران انسانی خود نیستند. متیو می گوید این مورد یکی از اهداف تحقیقاتی آینده این مرکز خواهد بود.
منبع: techxplore





